喜讯 | 理工学院机器人与人工智能实验室多名本科学生的一作论文被IEEE ROBIO 2019接收
近日,机器人学与仿生学国际大会IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO)公布了2019年论文录用情况,香港中文大学(深圳)理工学院机器人与人工智能实验室有多篇论文被接收。其中,3篇的第一作者以及2篇的共同第一作者是理工学院本科生。
《一种新的自主帆船涡轮-风帆耦合推进系统》的作者为电子信息工程专业大四学生仇佳怡、侯佳凡和博士生刘崇锋。《基于机载激光雷达定位算法下的多机器人协同搬运》的作者是电子信息工程专业大四学生胡智娴和赵志翔。《自适应的帆船位置保持算法》的作者是电子信息工程专业大三学生冯泽远。电子信息工程专业大四学生东奕冰同学、丁啸同学及大三学生李治俊共同发表了论文《翼帆车的建模及系统验证》。《基于由粗到细策略的强化学习的无人帆船避障》的作者是计算机科学与技术专业大四学生成子源。
论文
IEEE ROBIO 2019接收香港中文大学(深圳)理工学院的本科生论文包括:
“An Adaptive Position Keeping Algorithm for Autonomous Sailboats”,Zeyuan Feng, Jiayi Qiu, Hengli Liu, Qinbo Sun, Ning Ding, Zhenglong Sun, Tin Lun Lam and Huihuan Qian
“A New Turbine-Sail Coupled Propulsive System for Autonomous Sailboats”,Jiayi Qiu, Jiafan Hou, Chongfeng Liu, Hengli Liu, Xiongwei Lin, Zhenglong Sun, Ning Ding, Tin Lun Lam, and Huihuan Qian
“Wing Sail Land-yacht Modeling and System Verification”,Yibing Dong, Xiao Ding, Zhijun Li (共同第一作者), Lianxin Zhang, Hengli Liu, Ning Ding, Zhenglong Sun, Huihuan Qian
“Obstacle Avoidance for Autonomous Sailboats via Reinforcement Learning with Coarse-to-fine Strategy”,Ziyuan Cheng, Weimin Qi, Qinbo Sun, Hengli Liu, Ning Ding, Zhenglong Sun, Tin Lun Lam and Huihuan Qian
“Collaborative Object Transportation by Multiple Robots with Onboard Object Localization Algorithm”,Zhixian Hu, Zhixiang Zhao(共同第一作者), Lianxin Zhang, Hengli Liu, Ning Ding, Zhenglong Sun, Lin Tun Lam, Huihuan Qian
大会介绍
IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO) 迄今为止已成功举办了15年, 是机器人领域亚太地区知名的国际会议。2019年的机器人学与仿生学国际大会于12月在中国云南大理召开。
成果速递
01
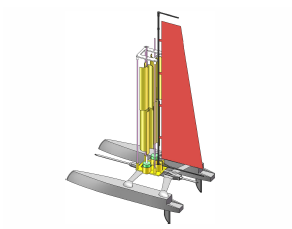
在钱辉环教授的指导下,电子信息工程专业大四学生仇佳怡、侯佳凡和博士生刘崇锋完成了《一种新的自主帆船涡轮-风帆耦合推进系统》。在远洋航行时,无人帆船需要解决能源问题并更好地利用风能来获得所需推进力。论文中提出一种在风帆两侧加上垂直发电机并实现发电机转速可控的新型系统,探究该系统对帆船最大推进力的影响。根据大量在风洞实验室中完成的实验,论文发现在顺风航行时该系统可以增大帆船所能得到的最大推进力。文章也证实,调节两侧发电机转速,能进一步调节帆船可获的最大推进力。
02
在研究助理教授孙正隆和博士生张连鑫的指导下,电子信息工程专业大四学生胡智娴和赵志翔完成了《基于机载激光雷达定位算法下的多机器人协同搬运》。论文提出了新的机载激光雷达定位算法,并设计了一个较为普适的协同搬运控制策略。算法与策略的有效结合可以实现物体在被搬运过程中的轨迹跟踪。在以往的协同搬运研究中,被搬运物体的定位基本是依靠额外的定位装置或固定装置。而论文提出的定位算法,在没有额外装置的帮助下,也能较为精准地确定被搬运物体位置。在已知物体位置的条件下,协同搬运控制策略可以实现对搬运过程的有效控制。真实场景中的实验结果验证了定位算法的有效性,而进一步的实验证明了协同搬运策略的可行性。

03
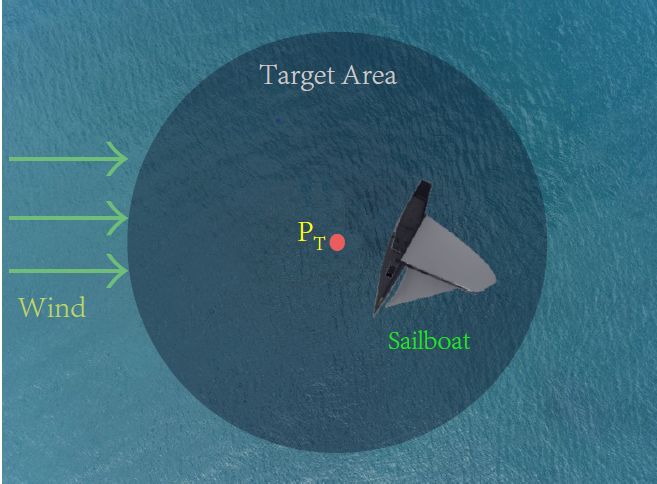
在博士后刘恒利及博士生孙钦波的指导下,电子信息工程专业大三学生冯泽远完成了《自适应的帆船位置保持算法》。船舶的位置保持在实际中有很重要的应用,如定位水下无人艇,交换货物,虚拟锚定等。由于帆船风驱动的特性,其位置保持颇有挑战性,目前的算法通常忽略了环境扰动,特别是帆船松帆时风带来的扰动,因而在实际场景下效果不佳。本文提出了一个更加鲁棒的算法及底层控制器,使得帆船能在风速风向变化的情况下进行位置保持,并在仿真及实验平台下验证了控制效果。

04
在博士生张连鑫指导下,电子信息工程专业大四学生东奕冰同学、丁啸同学及大三学生李治俊共同创作的论文《翼帆车的建模及系统验证》提出了一种实用的翼帆车的结构设计,对其进行建模并加以验证。在陆帆车领域里,常用的软帆车稳定性较差,并在行驶方向上有较大的局限性。而对于翼帆车的研究也常常局限在顺风行驶的能力上。
这篇论文提出了一种基于硬质翼帆的帆车系统。该四轮翼帆车在行驶时具有良好的稳定性及可控性,且具有很大的可行驶方向范围。同时,对翼帆进行的建模和仿真实验以及在现实风场中进行的实验验证了该翼帆车在多角度逆风前进状态下的良好行驶能力。

05
在博士生祁卫敏和孙钦波的指导下,计算机科学与技术专业大四学生成子源的在论文《基于由粗到细策略的强化学习的无人帆船避障》中提出了一种基于强化学习的细粒度到细粒度的帆船自主避障的方法。
船只的位置信息作为帆船避让控制中一个十分重要的输入,更准确的定位能有效提高避让效率。具体地,在粗粒度下粗略定位帆船,进而可以跳转到细粒度下获得更准确的帆船位置。其中粗粒度阶段用于控制帆船在距离障碍物较远情况下的正常航行,而细粒度阶段使帆船在距障碍物较近时能够进行精确的避让。我们不仅通过仿真验证了算法的可行性与有效性,还在现实实验中进行了测试,并取得了很好的避让效果。值得一提的是,本篇论文已经获得了最佳论文Final List奖励。
导师介绍
01
钱辉环教授,香港中文大学(深圳)理工学院助理教授,于2004年获得中国科技大学工学学士后,同年加入香港中文大学自动化与计算机辅助工程学学系,担任助理研究员。2010年,钱教授获得自动化与计算机辅助工程学哲学博士学位,此后在机械与自动化工程学系,历任副研究员、研究助理教授。
钱教授发表了2部专著、1部编著、50余篇国际期刊以及国际会议论文,并取得6项已获授权的专利。他主持了2项香港政府资助的项目,并作为核心成员参与完成了10项在香港和内地的项目。由于其在全方位汽车转向界面方面的工作,钱教授和他的科研团队获得IEEE/ASME 机电一体化学报的2011年度最佳论文奖。他的研究方向包括机器人、人机交互与能源。

02
林天麟教授,香港中文大学(深圳)理工学院助理教授。他于2006年和2010年获得香港中文大学一等荣誉工程学学士和自动化与计算机辅助工程系博士学位。他的研究方向主要是现场机器人技术,人机交互和智能控制领域。他在机器人和自动化系统的开发方面拥有丰富的经验,如远程呈现机器人、无人海面车辆、爬树机器人、四轮独立转向和驾驶车辆、工业6轴机器人臂系统、救援机器人、家庭服务机器人和教学机器人。
他获得了40多项专利,曾被众路透社、探索频道、福布斯和IEEE频谱等报道。他发表了2篇专著,6篇国际期刊论文,近30篇国际会议论文。林教授担任TRO、JFR、ICRA和IROS等机器人和自动化领域的主要国际期刊和会议论文的联合主席和审稿人。他的一篇期刊论文于2011年获得IEEE / ASME T-MECH最佳论文奖。

03
孙正隆教授,香港中文大学(深圳)理工学院研究助理教授。孙正隆教授先后于2005年和2007年获得新加坡南洋理工大学生物医学工程学士学位和机电一体化系统与设计硕士学位。2008年,他在美国约翰霍普金斯大学担任访问学者。2013年,他获得南洋理工大学博士学位,并开始在新加坡科技与设计大学SUTD-MIT国际设计中心进行博士后研究。他的主要研究领域包括医疗设备研发、系统建模、力传感与控制以及人机交互等。




